










Contents
- 1. ŽćįŽłĒžä§žļ†ŪĒĄ2005/RUR-PLE
- 2. žěĎžĄĪŪēú žÜĆžä§
- 3. žčúÍįĄ ŽįįŽ∂Ą
- 4. RUR-PLE žĚīŽěÄ ?
- 5. Í∑úžĻôŽď§
- 6. ÍįĄŽč®Ūēú Žü¨ŪĒĆ žā¨žö©Ž≤ē
- 7. Í≤ĹŪíą
- 8. žįłÍ≥†
1. ŽćįŽłĒžä§žļ†ŪĒĄ2005/RUR-PLE ¶
- ž§ÄŽĻĄžěź : 01 Žā®žÉĀŪėĎ
- žĚľžčú : ŽćįŽłĒžä§ žļ†ŪĒĄ Ž™©žöĒžĚľ
2.1. žąėŪôē ¶
3. žčúÍįĄ ŽįįŽ∂Ą ¶
- žīĚ žÜĆžöĒ žėąžÉĀ žčúÍįĄ : 4žčúÍįĄ 5Ž∂Ą
- ÍįĄŽč®Ūēú žĄ§Ž™Ö 5Ž∂Ą
- Ž°úŽīá žā¨žö©Ž≤ē 5Ž∂Ą
- žôľž™ĹžúľŽ°ú ŽŹĆÍłį 5Ž∂Ą + žóįžäĶ 5Ž∂Ą
- žāźžāź žėģÍłįÍłį žĄ§Ž™Ö + žóįžäĶ 5Ž∂Ą
- ŽĒĒŽ≤ĄÍĻÖ Žį©Ž≤ē 5Ž∂Ą
- Ž≤Ĺ ŽßĆŽď§Íłį 5Ž∂Ą + žóįžäĶ 20Ž∂Ą(žč†Ž¨łŽįįŽč¨, žąėŪôē)
- ž§ĎŽ≥Ķ ŪĒľŪēėÍłį 5Ž∂Ą + žėąž†Ą žÜƞ䧞󟞥ú ž§ĎŽ≥Ķ ž†úÍĪį(10Ž∂Ą)
- ifŽ¨ł žā¨žö© + žóįžäĶ 5Ž∂Ą
- not žā¨žö© + žóįžäĶ(žąėŪôē2) 40Ž∂Ą
- while žā¨žö© + žóįžäĶ(žąėŪôē3) 10Ž∂Ą
- sorting Ž¨łž†ú 120Ž∂Ą
4. RUR-PLE žĚīŽěÄ ? ¶
- ŪĒĄŽ°úÍ∑łŽěėŽįć žĖłžĖīŽ•ľ ŽįįžöįŽäĒÍ≤ÉžĚÄ žě¨ŽįĆžĖīžēľ ŪēúŽč§ŽäĒ ž∑®žßĞ󟞥ú ŽßƎ吏ĖīžßĄ ŪôėÍ≤ĹžĚīŽč§. žč§ž†úŽ°ú ŪēīŽ≥īŽ©ī žě¨ŽįĆŽč§. ŽŹĄžõÄŽŹĄ ŽßéžĚī ŽźúŽč§.
- Python žĖłžĖīŽ•ľ žā¨žö©Ūēėžó¨ žĽīŪď®ŪĄį ŪĒĄŽ°úÍ∑łŽěėŽįć žĖłžĖīŽ•ľ Žįįžöłžąė žěąŽäĒ ŪôėÍ≤ĹžĚīŽč§.
- Python Ž¨łŽ≤ē ÍłįŽįėžĚīžßÄŽßĆ, Ž™įŽĚľŽŹĄ žÉĀÍīÄžóÜŽč§. ž£ľžĖīžßĄ Ūē®žąėŽď§žĚĄ ÍįÄžßÄÍ≥† ŪēīÍ≤įŪēī ŽāėÍįÄÍłį ŽēĆŽ¨łžĚīŽč§. Ž≥ÄžąėŽŹĄ žēąžďīŽč§.

- žč§ž†úŽ°ú Ž°úŽīážóź ŪĒĄŽ°úÍ∑łŽěėŽįć ŪēīžĄú Í∑ł Ž°úŽīážĚī ŪėĄžč§žóźžĄú žěźžč†žĚī ŪĒĄŽ°úÍ∑łŽěėŽįć ŪēėŽäĒŽćįŽ°ú žõÄžßĀžĚīŽäĒÍ≤ɞ̥ Ž≥īŽ©ī ž†ēŽßź žĘčÍ≤†žßÄŽßĆ žó¨ÍĪīžĚī žēąŽźėŽäĒ ŽßĆŪĀľ -_-; ŪôĒŽ©īžúľŽ°úŽāėŽßą Í∑ł Ž°úŽīážĚī žõÄžßĀžĚīŽäĒ Í≤ɞ̥ Ž≥īŽ©īžĄú ŪĒĄŽ°úÍ∑łŽěėŽįć ŪēīŽ≥ľ žąė žěąŽč§. žó¨ÍłįžóźžĄú žěĎžĄĪŪēėŽäĒ žĹĒŽďúŽď§žĚī Ž¨īžä® žďłŽ™®ÍįÄ žěąžĚĄÍĻĆ žč∂ÍłįŽŹĄ ŪēėÍ≤†žßÄŽßĆ, ž∂ĒŪõĄžóź žč§ž†ú Ž°úŽīážĚė ŽŹôžěϞ̥ ŪĒĄŽ°úÍ∑łŽěėŽįćŪēīžĄú ŽĄ£ŽäĒŽč§Ž©ī žó¨ÍłįžĄú žďįžĚīŽäĒ Žį©žčĚÍ≥ľ ŽĻĄžä∑ŪēėÍ≤Ć ŽĄ£žĚĄÍ≤ÉžĚīŽč§.(ŪēėŽďúžõ®žĖīž†ĀžúľŽ°ú Ž≥Ķžě°ŪēúÍ≤ɞ̥ Ž™ÖŽ†ĻžĖīŽ°ú ž∂ĒžÉĀŪôĒ žčúŪā®Žč§žĚĆžóź Í∑ł Ž™ÖŽ†ĻžĖīžĚĄ ž†Āž†ąŪēėÍ≤Ć Ž≥ĶŪē©ž†ĀžúľŽ°ú žā¨žö©Ūēėžó¨ žõźŪēėŽäĒ ŪĖČŽŹôžĚĄ Ž°úŽīážĚī ŪēėÍ≤Ć ŽßĆŽďúŽäĒ žčĚžúľŽ°ú..) ž¶Č ŽßźÍ∑łŽĆÄŽ°ú Ž°úŽīá ŪĒĄŽ°úÍ∑łŽěėŽįćžĚĄ ÍįĄž†Ďž†ĀžúľŽ°úŽāė ŪēīŽ≥ľ žąė žěąŽč§.
5.1. Í∑úžĻô 1 ¶
- žĽīŪď®ŪĄį ŪĒĄŽ°úÍ∑łŽěėŽįćžĚĄ žĚĶŪ칎äĒ Í≤ÉžĚÄ žēÖÍłįŽ•ľ žĚĶŪ칎äĒ Í≤ÉÍ≥ľ ŽĻĄžä∑ŪēėŽč§. ŽčĻžč†žĚÄ Í∑łÍ≤Éžóź ÍīÄŪēī Žč®žąúŪěą žĚĹÍłį ŽßźÍ≥† ŪēīŽīźžēľ ŪēúŽč§.
6.1. Ž°úŽīá ŪēúŽ≤ą žõÄžßĀžó¨ Ž≥ľÍĻĆ? ¶
- žįŞ󟞥ú Robot: Code and Learn ŪÉ≠žĚĄ žĄ†ŪÉĚŪēúŽč§.
- žôľž™Ĺ žĹĒŽďú žďįŽäĒ ŪôĒŽ©īžóź žēĄŽěėžôÄ ÍįôžĚÄ žĹĒŽďúŽ•ľ ŽĄ£žĖī Ž≥łŽč§.
~cpp move() turn_off()
- Í∑łŪõĄ ŪôĒŽ©īžóź Mp3 Play Ž≤ĄŪäľ ŽĻĄžä∑ŪēėÍ≤Ć žÉĚÍłī Ž≤ĄŪ侞̥ ŪĀīŽ¶≠ŪēúŽč§.
- ž†Äžě•ŪēėŽĚľŽäĒ žįĹžĚī Žāėžė§Ž©ī test ŽĚľÍ≥† ŽĄ£Í≥† ž†Äžě•ŪēúŽč§.
- Í∑łŽ¶¨Í≥† Žč§žčú play Ž≤ĄŪ侞̥ ŽąĄŽ•łŽč§.
6.1.1. Ūā§Ž≥īŽďúŽ°ú Ž°úŽīá žõÄžßĀžĚīÍłį ¶
- ŪôĒŽ©īžĚė Ž°úŽīážĚĄ ŪĀīŽ¶≠ŪēúŽč§.
- žôľž™Ĺ Žį©ŪĖ• Ūā§Ž≥īŽďúŽ•ľ ŽąĄŽ•īŽ©ī Žį©ŪĖ•žĚī ŽįĒŽÄźŽč§.
- žúĄž™Ĺ Žį©ŪĖ• Ūā§Ž≥īŽďúŽ•ľ ŽąĄŽ•īŽ©ī žēěžúľŽ°ú žĚīŽŹôŪēúŽč§.
6.2. žôľž™ĹžúľŽ°ú Ūē® ŽŹĆžēĄ Ž≥ľÍĻĆ? ¶
- žēĄŽěėžôÄ ÍįôžĚÄ žĹĒŽďúŽ•ľ ŽĄ£žĖī Ž≥łŽč§.
~cpp move() turn_left() move() turn_off()
- ŪēúžĻł žēěžúľŽ°ú ÍįĄŽč§žĚĆžóź žôľž™ĹžúľŽ°ú ŽŹĆÍ≥†ŽāėžĄú ŪēúžĻł žēěžúľŽ°ú ÍįÄÍ≥† ŽāėžĄú ž†ēžßÄŪēėŽäĒÍ≤ɞ̥ Ž≥ľ žąė žěąŽč§.
6.2.1. žóįžäĶ ¶
- Ž°úŽīážĚī ÍłłžĚī 2žĚł žā¨ÍįĀŪėēžĚĄ Í∑łŽ¶¨Ž©īžĄú ŽįėžčúÍ≥Ą Žį©ŪĖ•žúľŽ°ú ŽŹĄŽäĒÍ≤ɞ̥ ŽßƎ吏Ėī Ž≥īžěź.

- Ž°úŽīážĚī žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚī žõÄžßĀžĚīÍ≤Ć ŪēīŽ≥łŽč§.


6.3. žāźžāź(beeper) žėģÍłįÍłį ¶
- beeperŽ•ľ žėģÍ≤® Ž≥īžěź.
- beeperŽ•ľ ŽďúŽäĒ Ž™ÖŽ†ĻžĖī : pick_beeper()
- beeperŽ•ľ ŽāīŽ†§ ŽÜďŽäĒ Ž™ÖŽ†ĻžĖī : put_beeper()
- beepers1.wld ŪĆƞ̾žĚĄ žóįŽč§.
- žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚī ŪēėŽäĒ žĹĒŽďúŽ•ľ žßúŽ≥łŽč§.


6.4. ŽĒĒŽ≤ĄÍĻÖ Žį©Ž≤ē? ¶
- RUR-PLEžóźžĄúŽŹĄ ŽĒĒŽ≤ĄÍĻ̥֞ ŪēúŽč§.
- PlayŽ≤ĄŪäľ žėÜžóź Play Ž™®žĖĎÍ≥ľ žěĎŽĆÄÍłį ŪēėŽāė žěąŽäĒÍ≤ÉžĚÄ step intožôÄ ŽĻĄžä∑Ūēú žó≠Ūē†žĚĄ ŪēúŽč§. Ž™ÖŽ†ĻžĖīÍįÄ ŪēėŽāėžĒ© žč§ŪĖČŽźúŽč§. ŪėĄžě¨ žč§ŪĖČŽźėÍ≥† žěąŽäĒ Ž™ÖŽ†ĻžĖīŽäĒ žĹĒŽďú Ž∂ÄŽ∂ĄžóźžĄú ŪöĆžÉČžúľŽ°ú highlighting ŽźúŽč§.
- PlayŽ≤ĄŪ侞̥ ŪĀīŽ¶≠ŪēėÍ≥† ŽāėžĄú Ž°úŽīážĚī žõÄžßĀžĚīÍ≥† žěąŽäĒ ŽŹĄž§Ďžóź žěźžč†žĚī žõźŪēėŽäĒ žąúÍįĄžóź step into Ž≤ĄŪäľ(play Ž≤ĄŪäľ žėÜžóź žěąŽäĒ)žĚĄ ŪĀīŽ¶≠ŪēėŽ©ī Í∑ł žąúÍįĄŽ∂ÄŪĄį Ž™ÖŽ†ĻžĖīÍįÄ ŪēėŽāė ŪēėŽāėžĒ© žč§ŪĖČŽźúŽč§.
- step into žėÜžóź žěąŽäĒ Ž≤ĄŪäľžĚÄ žĚľžčú ž§ĎžßÄ Ž≤ĄŪäľ
- Í∑ł žėÜžóź žěąŽäĒ ŽĻ®ÍįĄ Ž≤ĄŪäľžĚÄ žôĄž†Ą žĘÖŽ£Ć Ž≤ĄŪäľ
6.5. Ž≤Ĺ ŽßƎ吏Ėī Ž≥īžěź~! ¶
- Ž≤ĄŪäľŽď§ ž§ĎžóźžĄú Ž≤Ĺ ž≤ėŽüľ žÉĚÍłī Ž≤ĄŪ侞̥ ŪĀīŽ¶≠ŪēúŽč§. Í∑łŽüľ žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚÄ ŪôĒŽ©īžĚī Žāėžė®Žč§. žó¨ÍłįžĄú ŪĀīŽ¶≠! ŪĀīŽ¶≠~! ŪēīžĄú Ž≤Ŏ吏̥ ŽßĆŽď§ žąė žěąŽč§.

6.5.1. žóįžäĶ ¶
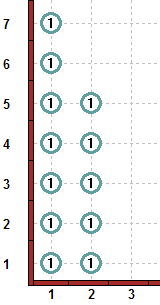
- žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚī Ž°úŽīážĚī žč†Ž¨łŽįįŽč¨ ŪēėÍ≤Ć Ūē® žĹĒŽďúŽ•ľ žěĎžĄĪŪēīŽ≥īžěź


- žēĄŽěėžôÄ ÍįôžĚÄ žßÄŽŹĄžóźžĄú 1 Ž™®ŽĎźŽ•ľ žąėŪôēŪēėŽäĒ žĹĒŽďúŽ•ľ žěĎžĄĪŪēī Ž≥īžěź.

6.6. ž§ĎŽ≥Ķ ŪĒľŪēėÍłį ¶
- žēĄŽěėžôÄ ÍįôžĚī def Ž•ľžć®žĄú Ūē®žąėŽ•ľ ž†ēžĚėŪē† žąė žěąŽč§.

- repeat Ž™ÖŽ†ĻžĖīŽ•ľ žć®žĄú žó¨Žü¨Ž≤ą žąėŪĖČŪēīžēľ ŪēėŽäĒ Ūē®žąė(Ž™ÖŽ†ĻžĖī ŪŹ¨Ūē®)žĚĄ ŪēúŽ≤ąžóź Žį©Ž≥Ķ ŪöüžąėŽßĆ žßÄž†ēŪēīžĄú žā¨žö©Ūē† žąė žěąŽč§.
~cpp
def turn_right():
repeat(turn_left, 3)
- Ž≤Ĺ ŽßĆŽď§Íłį žóįžäĶžóźžĄú Ūēú žĹĒŽďúŽď§žĚĄ Ūē®žąėŪôĒ ŪēīžĄú ž§ĎŽ≥Ķ ž†úÍĪįŽ•ľ ŪēúŽč§.
6.7. if Ž¨ł žā¨žö© ¶
- next_to_a_beeper() : beeperÍįÄ ŪėĄžě¨ Ž°úŽīážĚė žěźŽ¶¨žóź žěąžúľŽ©ī true, žóÜžúľŽ©ī falseŽ•ľ ŽįėŪôėŪēúŽč§.
~cpp
if next_to_a_beeper():
pick_beeper()
- žúĄžĚė ifŽ¨łÍ≥ľ Ūē®žąė ž†ēžĚė, repeatŽ•ľ žā¨žö©Ūēėžó¨ žēĄŽěė ŪôĒŽ©īÍ≥ľ ÍįôžĚÄ žÉĀŪô©žĚĄ ž≤ėŽ¶¨ŪēúŽč§.


6.7.1. else Ž¨ł žā¨žö© ¶
- front_is_clear() : Ž°úŽīážēěžóź Ž≤ĹžĚī žóÜžúľŽ©ī true, žěąžúľŽ©ī false
- left_is_clear() : Ž°úŽīážĚė žôľž™Ĺžóź Ž≤ĹžĚī žěąŽäĒžßÄ Í≤Äžā¨
- right_is_clear() : Ž°úŽīážĚė žė§Ž•łž™Ĺžóź Ž≤ĹžĚī žěąŽäĒžßÄ Í≤Äžā¨
- else Ž¨łžĚÄ žēĄŽěė žĹĒŽďúž≤ėŽüľ žďīŽč§.
~cpp
def move_or_turn():
if front_is_clear():
move()
else:
turn_left()
- žēĄÍ∑łŽěė Í∑łŽ¶ľž≤ėŽüľ Ž°úŽīážĚī Žį©žēąžĚĄ ŪēúŽįĒŪÄīŽŹĆÍ≤Ć ŪēīŽ≥īžěź. Žį© ŪĀ¨Íłįžóź ŽĒįŽĚľžĄú ŽįėŽ≥Ķ ŪöüžąėŽ•ľ Žč§Ž•īÍ≤Ć Ūēīž§ėžēľ ŪēúŽč§. ŪĀ¨ÍłįÍįÄ 5ŽĚľŽ©ī 5*4=20 žĚīŽüįžčĚžúľŽ°ú..

6.8. not ¶
- notžĚÄ žēĄŽěėžôÄ ÍįôžĚÄ žčĚžúľŽ°ú žā¨žö©ŪēúŽč§.
~cpp
if not next_to_beeper():
move()
else:
turn_off()
6.8.1. žóįžäĶ ¶
- žēĄŽěė Í∑łŽ¶ľž≤ėŽüľ ŽßƎč§.

- Ž¨łž†úžóźžĄú žēĄŽěėžôÄ ÍįôžĚÄ žÜƞ䧎•ľ žįłÍ≥† ŪēėŽĚľÍ≥† ŪēúŽč§. ž†ÄŽäĒ žĘÄ Žč§Ž•īÍ≤Ć ŪĖąžäĶŽčąŽč§. žöįžĄ† žįłÍ≥†ŽäĒ ŪĖąÍ≥†..
~cpp
# introducing vocabulary related to the problem
next_to_a_carrot = next_to_a_beeper
plant_carrot = put_beeper
pick_carrot = pick_beeper
def one_carrot_only():
if not next_to_a_carrot():
plant_carrot() # replace missing seed
else:
pick_carrot()
if not next_to_a_carrot(): # oops!
plant_carrot() # we had removed the only one
6.9. while ¶
- žēĄŽěėžôÄ ÍįôžĚÄ žčĚžúľŽ°ú žā¨žö©ŪēúŽč§.
~cpp
next_to_a_carrot = next_to_a_beeper
plant_carrot = put_beeper
pick_carrot = pick_beeper
def one_carrot_only():
while next_to_a_carrot():
pick_carrot() # pick them all!
plant_carrot() # replant only one
- harvest3.wld ŪĆƞ̾žĚĄ žóįŽč§.
- whileŽ¨łžĚĄ žā¨žö©Ūēėžó¨ ž§ĎŽ≥ĶŽźú žĒ®žēóžĚė ÍįúžąėÍįÄ 2 žĚīžÉĀžĚł žěĄžĚėžĚė ÍįúžąėžĚľ Í≤ĹžöįžóźŽŹĄ ž≤ėŽ¶¨ ÍįÄŽä•ŪēėÍ≤Ć žúĄ žÜƞ䧎•ľ žąėž†ēŪēúŽč§.

6.10. Amazing Part ¶
- ž†ēŽßź žú†žĚĶŪēú Žāīžö©žĚīŽč§. ž£ľžĖīžßĄ ÍįĄŽč®Ūēú Ž™áÍįÄžßÄ žÉĀŪô©žĚĄ ŪēīÍ≤įŪēėŽ©ī ŽÜÄŽĚľžöī ÍłįŽä•žĚī ŽźėŽäĒÍ≤ɞ̥ Ž≥ľ žąė žěąŽč§.
- sorting Ž¨łž†úŽ•ľ ŪíÄÍ≥†ŽāėžĄú žčúÍįĄ Žā®žĚÄ Ž∂ĄžĚÄ ŪēīŽ≥īžčúÍłł. Žü¨ŪĒĆ Amazing žĄ§Ž™Ö
6.11. Sorting ¶
- sort0_1.wld ŪĆƞ̾žĚĄ žóįŽč§.
- ž£ľžĖīžßĄ žāźžāźŽď§žĚĄ Í∑łŽ¶ľž≤ėŽüľ žė§Ž¶Ąžį®žąúžúľŽ°ú Ž°úŽīážĚī ž†ēŽ†¨ŪēėÍ≤Ć ŽßƎ硫©ī ŽźúŽč§.
- žēĄŽěėŽäĒ ÍįĄŽč®ŪēėÍ≤Ć 2ÍįúžĚė columnžĚė Í≤Ĺžöį ž†ēŽ†¨Ūēú Ž™®žäĶžĚīŽč§.

- Žč§žĚĆžĚÄ sort0_2.wld ŪĆƞ̾žĚĄ žóįŽč§.
- žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚī žõźŽěė ž†ēŽ†¨ŽźėžĖī žěąŽäĒ Í≤ĹžöįžóźŽŹĄ ž†úŽĆÄŽ°ú žěĎŽŹôŽźėŽäĒžßÄ ŪÖĆžä§Ūäł ŪēīŽ≥łŽč§.

- sort1 ŪĆƞ̾žĚĄ žóįŽč§.
- žēĄŽěė Í∑łŽ¶ľÍ≥ľ ÍįôžĚī žĘÄŽćĒ Ž≥Ķžě°Ūēú žó¨Žü¨ÍįúžĚė column žóźžĄúŽŹĄ žěĎŽŹôŪēīžēľ ŪēúŽč§.


- sort2 ŽäĒ ž∂ĒŪõĄ Í≥ĶÍįú
7. Í≤ĹŪíą ¶
- sort1, sort2 ŽßĶžĚĄ ÍįÄžě• Ž®ľž†Ä Ž™®ŽĎź žė§Ž¶Ąžį®žąúžúľŽ°ú ž†ēŽ†¨ŪēėŽäĒ Ž∂ĄžóźÍ≤Ć ŽćįŽłĒžä§žļ†ŪĒĄ/2005/RUR-PLE/Í≤ĹŪíąžĚĄ ŽďúŽ¶ĹŽčąŽč§.
- 05 ž°įŪėĄŪÉú ÍĶįžĚī ÍįÄžě• Ž®ľž†Ä sortingžĚĄ ŪēīÍ≤įŪēėžó¨ Í≤ĹŪíąžĚĄ ŪÉĒžäĶŽčąŽč§. žĚīŪõĄ 01 ÍĻÄž†ēŪėĄ žĚī sort2 ŽßĶžóź ŽĆÄŪēīžĄú ŪēīÍ≤įŪēėžėÄžßÄŽßĆ sort1žóź ŽĆÄŪēīžĄúŽäĒ Ž∂ÄŽ∂Ąž†ĀžúľŽ°ú ŪēīÍ≤įŪēėžėÄžäĶŽčąŽč§.
ŽćįŽłĒžä§žļ†ŪĒĄ2005/RUR_PLE/ž°įŪėĄŪÉú